
About me
Robotics Controls Algorithms Engineer, mediocre tinkerer, part-time EE, runner, dreamer, rookie hiker
I’m a Robotics Controls Algorithms Engineer passionate about building intelligent, reliable, and safe autonomous systems. My interests lie at the intersection of nonlinear control, hybrid/networked systems, and optimization, with applications across robotics, UAVs, and autonomous vehicles.
I’m interested in developing both theoretical methods and computational tools in designing provably safe control and planning/learning algorithms from the ground up—leveraging tools from control theory, vehicle dynamics, and learning-based methods to solve real-world challenges in autonomous systems, flight control, and decision-making.
- Research Focus: Controls, Robotics, Learning, and Autonomy
- Languages: C/C++, MATLAB/Simulink, Stateflow, Python
- Platforms: ROS, dSPACE, MicroAutoBox II, Raspberry Pi, Jetson, VCU, ECU Scalexio, CANape, CANalyzer, PX4-Autopilot, UDP Ethernet, CANdb++, QGroundControl, PX4-SITL
- Current Research Interest: Provably safe control, adaptive autonomy and motion planning of autonomous systems, decision making under uncertainty, distributed control and estimation, multi-vehicle coordination and control, aerial robotics,
Selected Projects —
- UAV Autonomy
- Distributed Control, Coordination and Manipulation
- Learning 4 Control and Estimation
- Autonomous Vehicle Planning and Control
- Safety Critical Control (Control Barrier Functions and Safety Certificates)
UAV Autonomy

- Developed UAV dynamic models and implemented PD, PID, LQR/LQ, nonlinear Lyapunov-based, sliding-mode, backstepping, and Cartesian impedance controllers.
- Implemented geometric attitude control for quadrotors and differential flatness-based trajectory generation.
- Built quadrotor simulations in MATLAB/Simulink, Gazebo, PX4 SITL, and ROS.
- Built autopilot system for a quadrotor UAV, encompassing state estimation, path planning, and control. Implemented cascaded control loops for attitude, altitude, and position using both classical and modern control techniques (PID, LQR, nonlinear geometric control, and Model Predictive Control).
Quadrotor UAV Cascaded PID Control in PX4
State Dependent LQR for Autonomous Trajectory Tracking of Quadrotor UAV
Designed and implemented full state time varying LQR and implemented in real-time Gazebo and PX4 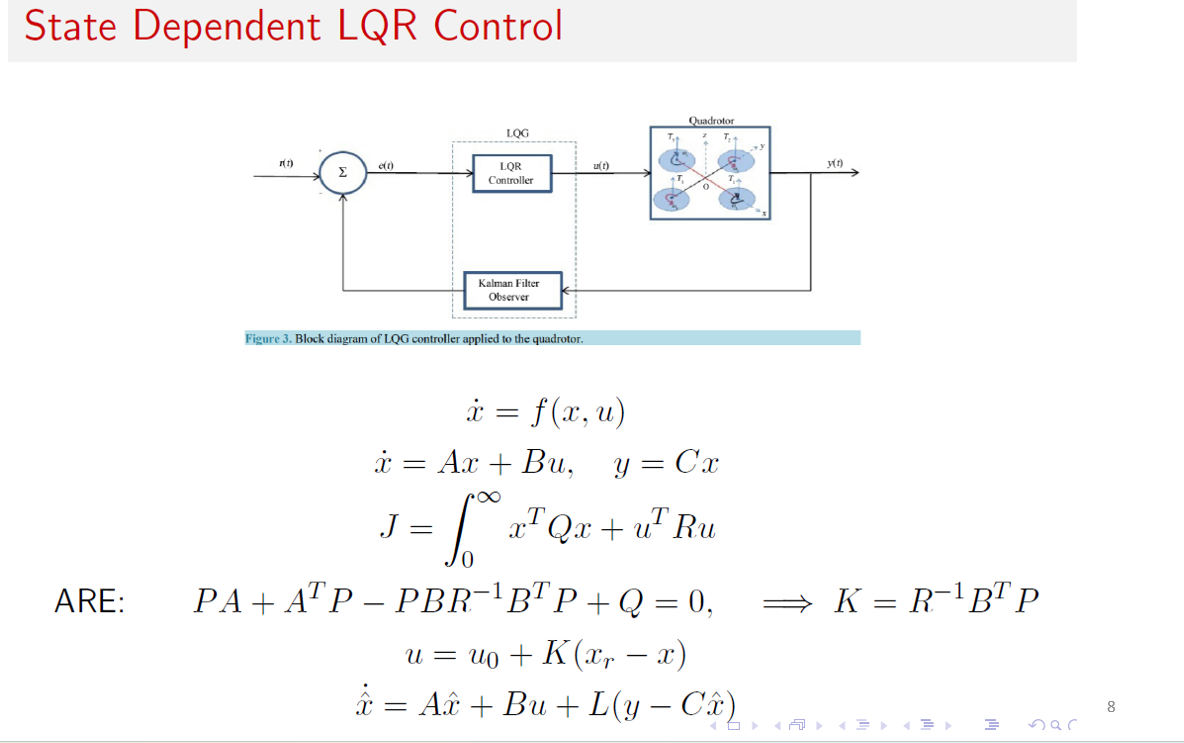
Offboard Velocity Control
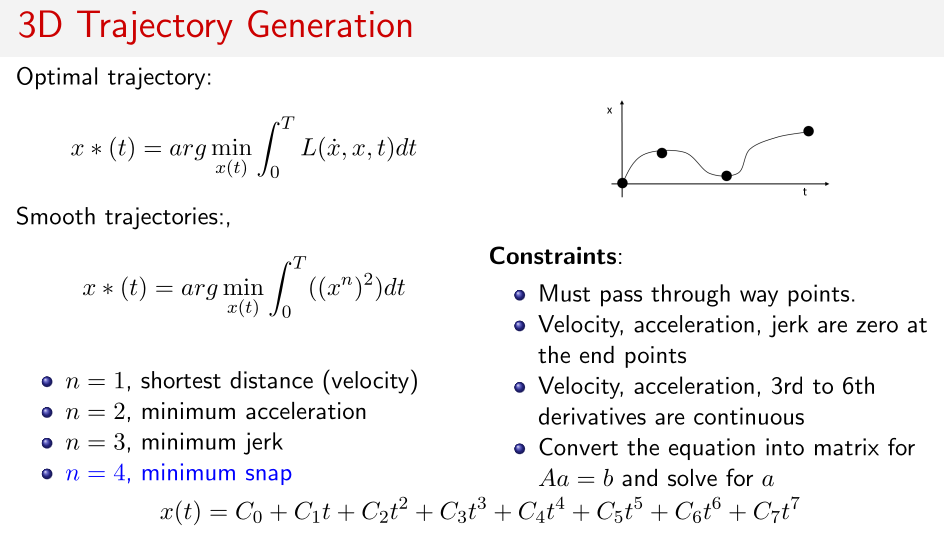
3D Trajectory Generation of UAV
Distributed Control, Coordination and Manipulation
Part of M.S. Research Work at Oklahoma State with Dr. He Bai at OSU. Joint work with Dr. Acosta from the University of Seville, Spain.
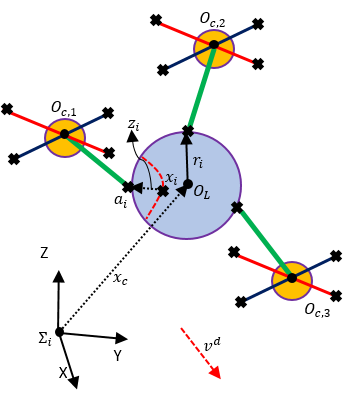
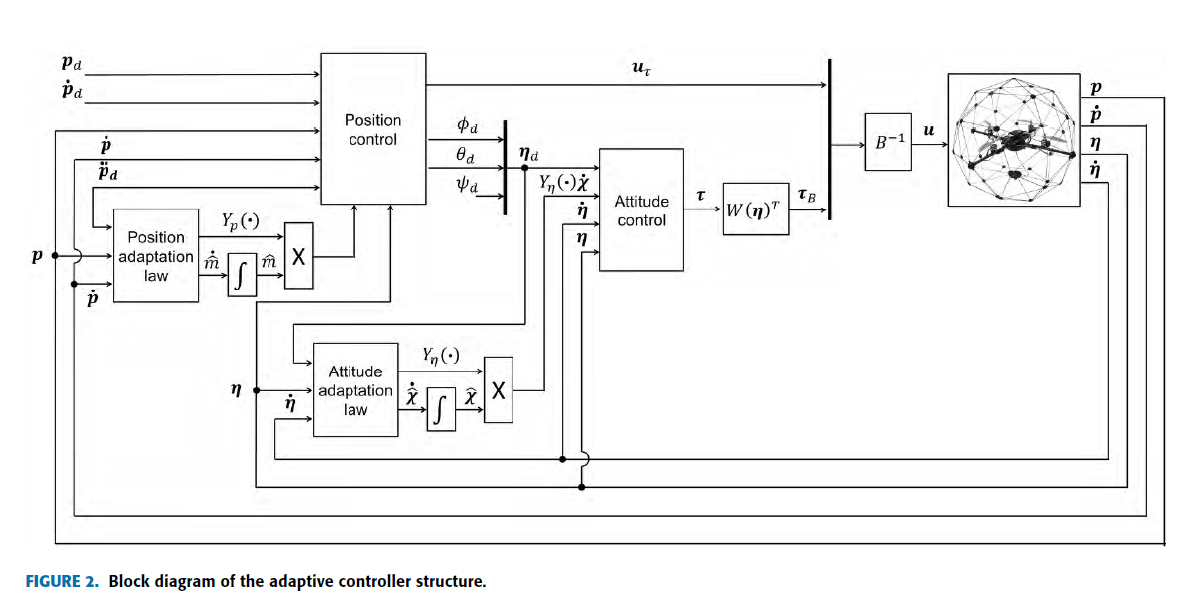
- Developed a decentralized multi-robot control framework for cooperative manipulation tasks. In this project, multiple quadrotor UAVs work together to transport a payload without requiring constant inter-robot communication. Designed adaptive force-sharing controllers that regulate payload forces while all agents coordinate their motion.
- Demonstrated stable payload transport even with unknown payload mass or external disturbances, and validated the approach in simulation and experiments.
Relevant Publications:
- [J2.] Thapa S., Bai H., and Acosta J.A. Cooperative Aerial Manipulation with Decentralized Adaptive Force-Consensus Control. Journal of Intelligent & Robotic Systems, Jan, 2020
- [C1.] Thapa S., Bai H, and Acosta J.A. Cooperative Aerial Load Transport with Attitude Stabilization. 2018 American Control Conference (ACC).
- [C2.] Thapa S., Bai H., and Acosta J.A. Force Control in Cooperative Aerial Manipulation. IEEE International Conference on Unmanned Aircraft Systems (ICUAS), June 12-15, 2018
- [C3.] Thapa S., Bai H., and Acosta J.A. Cooperative Aerial Load Transport with Force Control. IFAC Workshop on Networked & Autonomous Air & Space Systems, June 12-14, 2018
Cooperative Control of Unknown Payload, Adaptive Control, and Consensus Control.
Cooperative Attitude Control
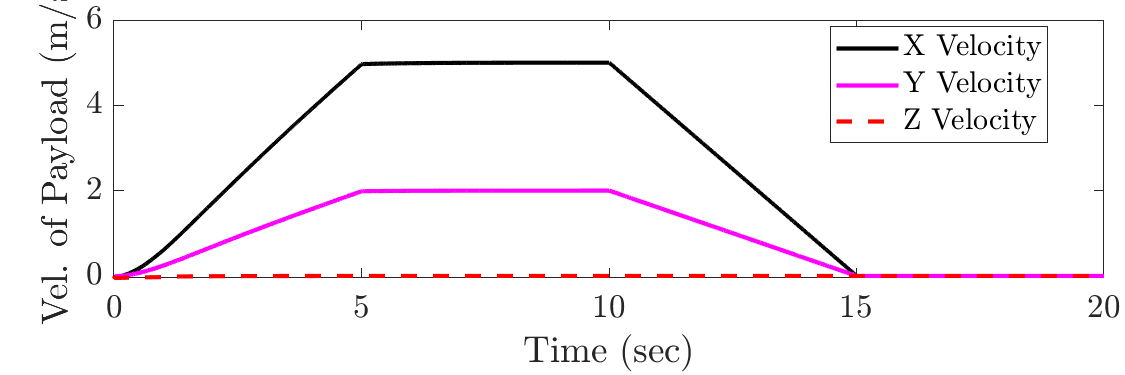
Cooperative Control with time-varying velocity
Aerial Manipulator Flight Test
Aerial Manipulator Design
Learning 4 Control and Estimation
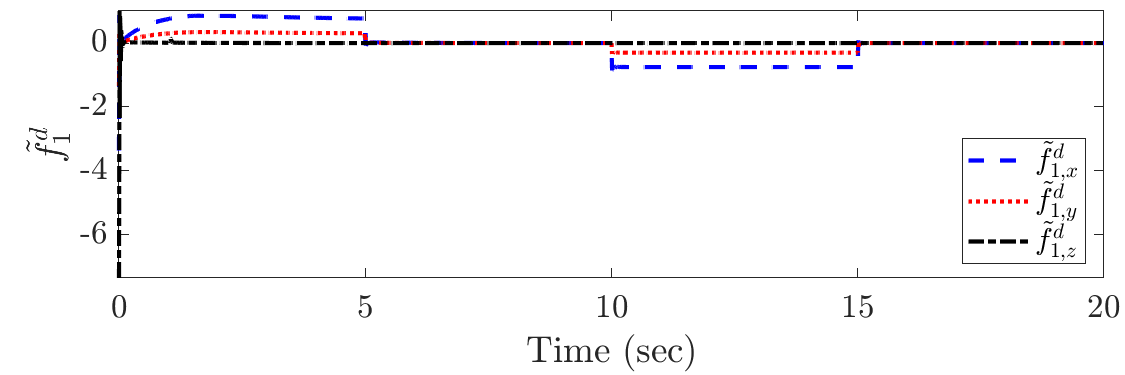
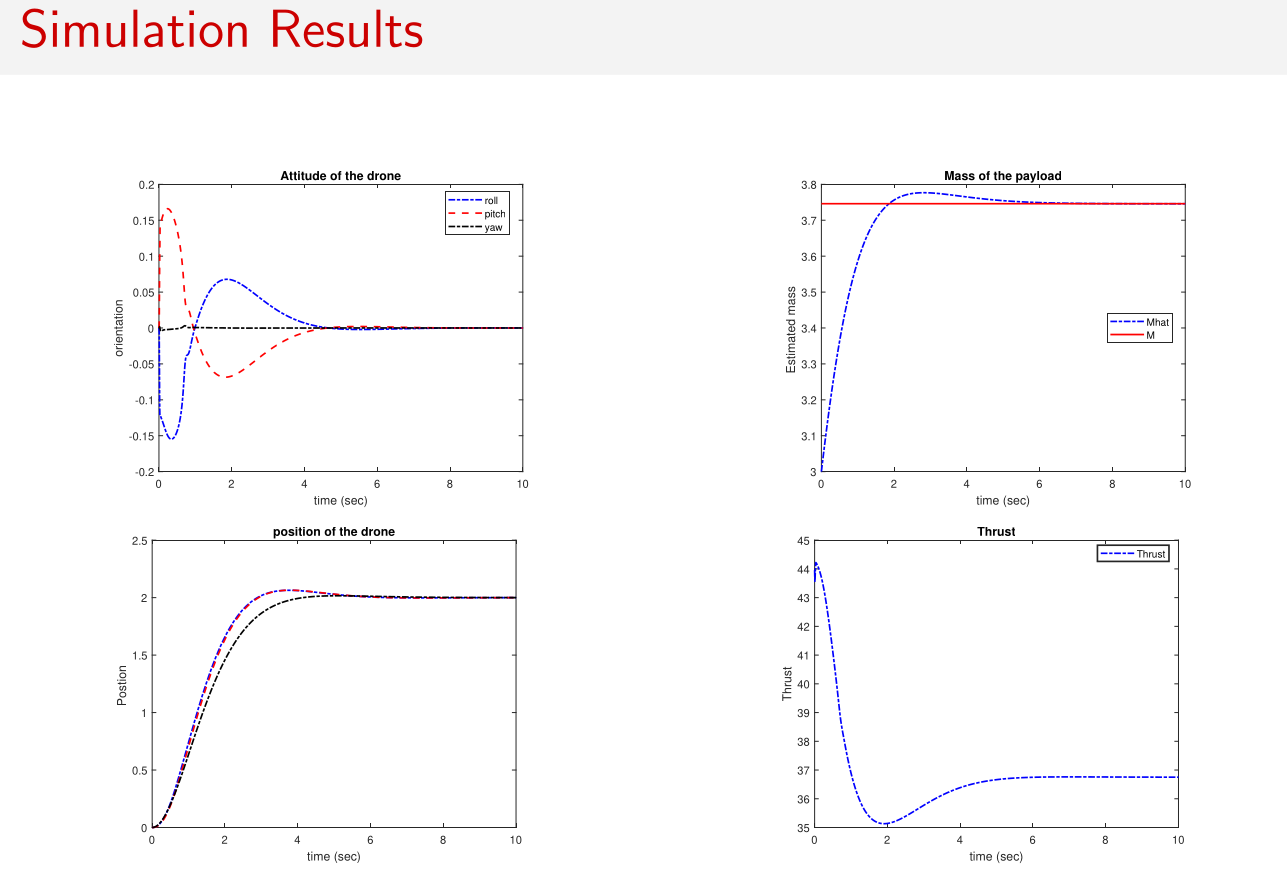
- Implemented a concurrent learning adaptive control algorithm for a team of robots transporting a common load. This approach enables real-time estimation of unknown parameters (such as payload mass and drag) and simultaneously drives all agents and the payload to a desired trajectory.
The algorithm guarantees parameter convergence (e.g., the estimated mass converges to the true mass) and improves transient performance by using past data to relax excitation requirements. Achieved accurate force regulation and synchronized motion in simulations, laying the groundwork for safer adaptive controllers in uncertain environments.
- [J1.] Thapa S., Self R., Bai H., and Kamalapurkar, R. Cooperative Manipulation of an Unknown Payload with Concurrent Mass and Drag Force Estimation. IEEE Control Systems Letters (L-CSS) with an option to present in CDC, 2019.
Drag Force Estimation
Contact Force Acting on the Payload
Simulation with Time-Varying Velocity
Non-linear Adaptive Geometric Control
Autonomous Vehicle Planning and Control
- Researched different control strategies for autonomous vehicles path following including LQR, nonlinear, pure-pursuit, sliding mode, and so on.
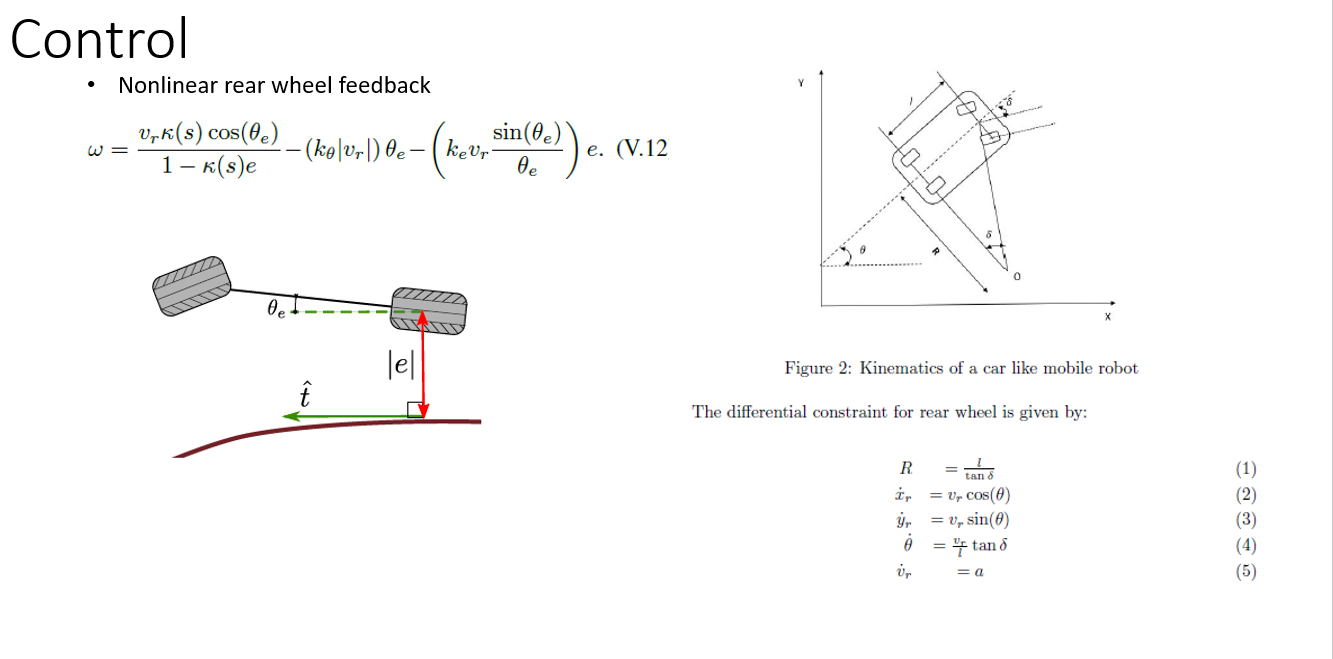
- Developed nonlinear rear-wheel feedback control for autonomous vehicle trajectory tracking.
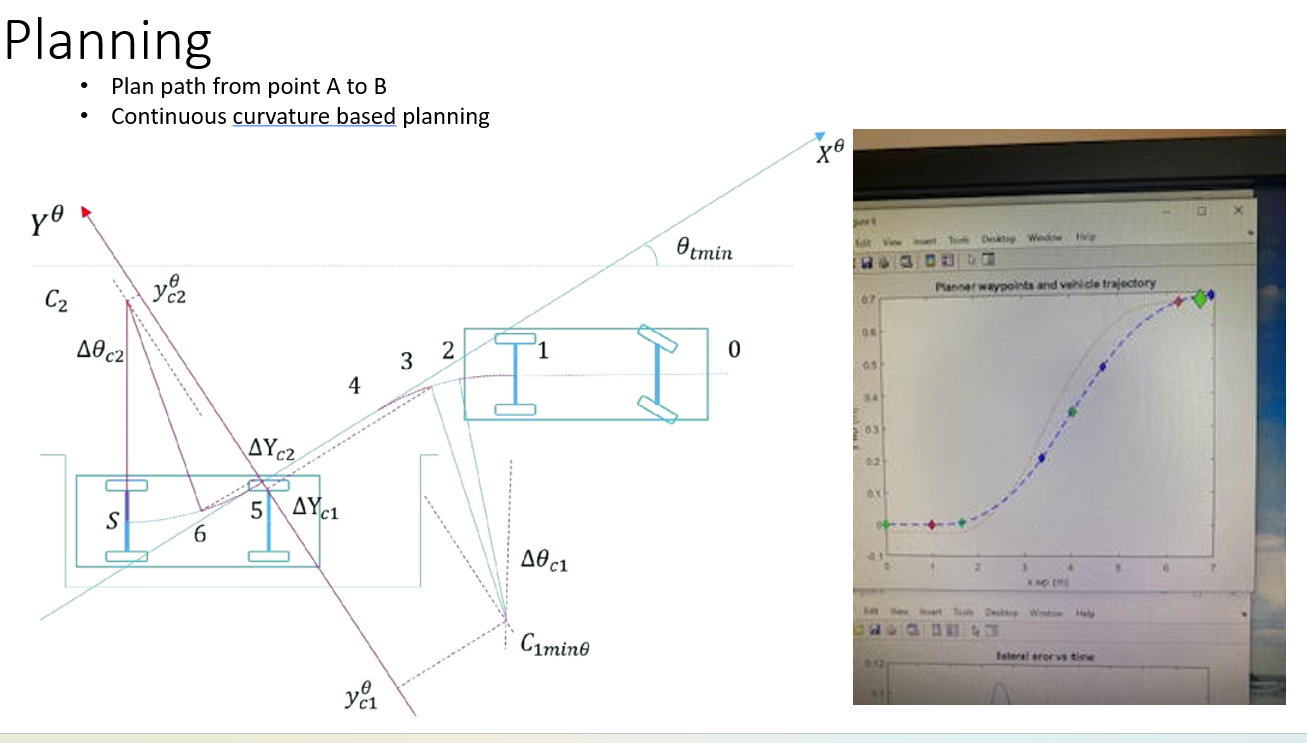
- Developed clothoid-based path planner for vehicle planning for parallel parking and auto-hitch.
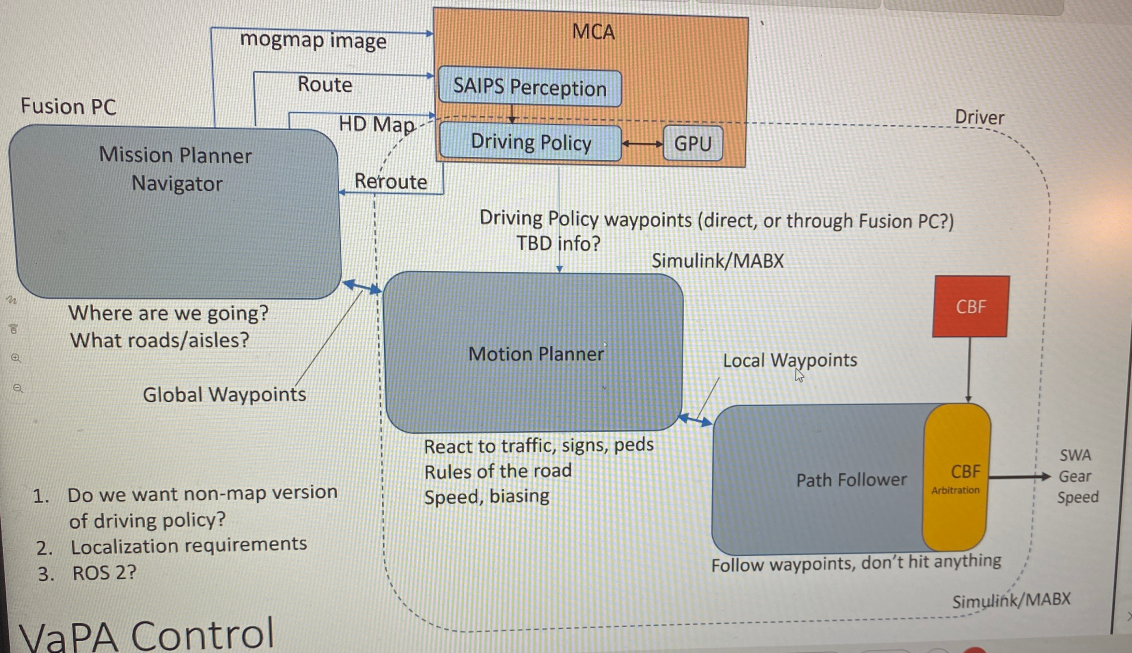
- Worked on state machines for state transition and safety certificates (CBFs) for vehicle control and planning.
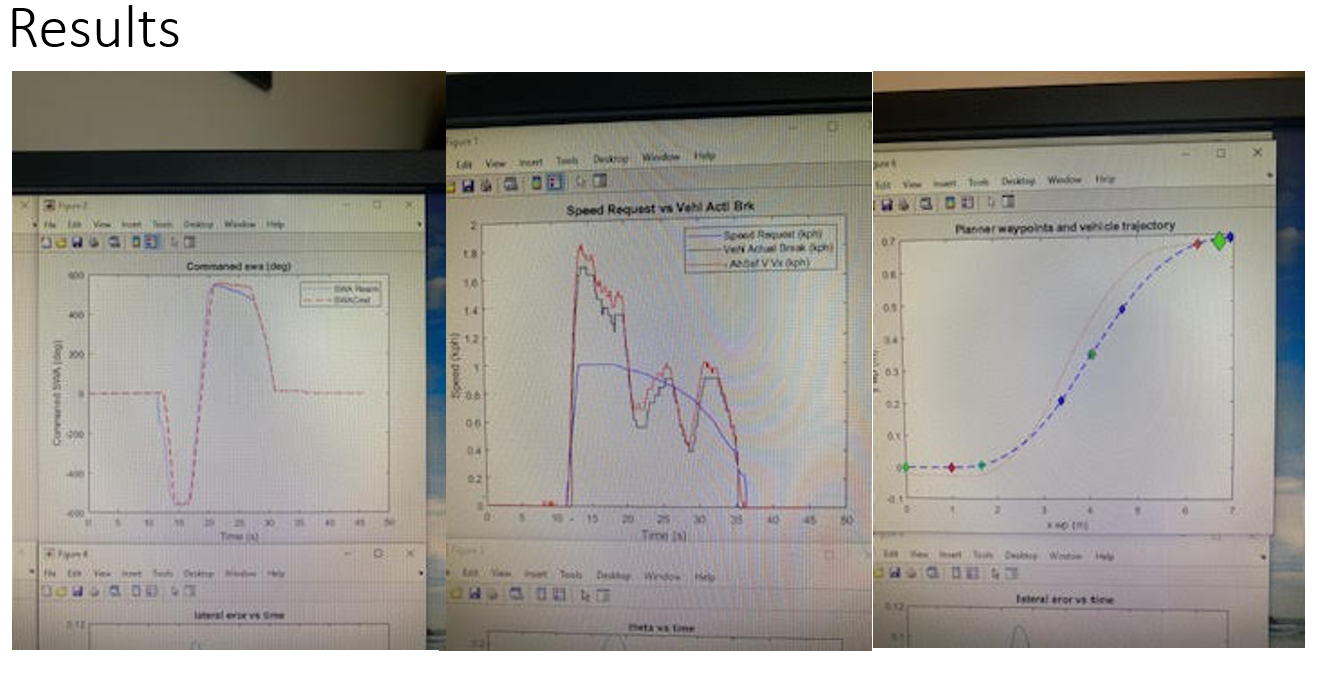
- Developed a simulator for validating vehicle controls and planning algorithms. Validated in dSPACE.
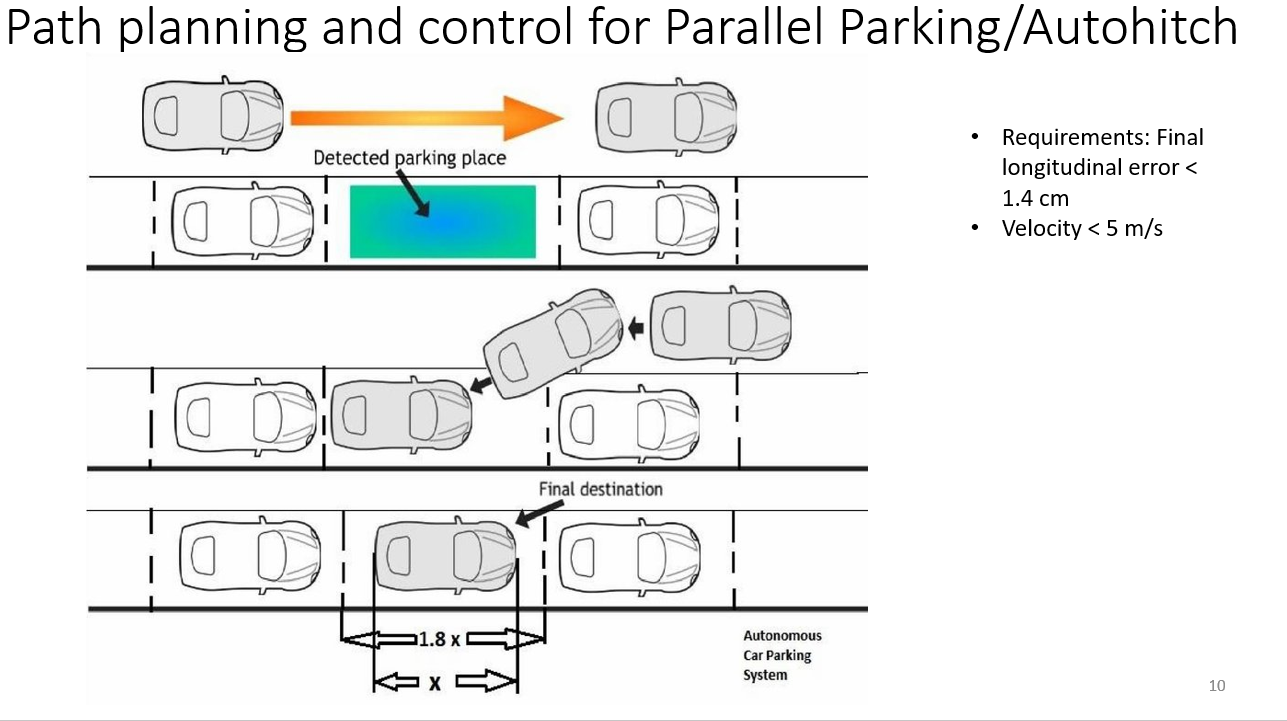
Path Planning Based on Clothoid
Non-linear Rear Wheel Feedback-Based Control
Vehicle Dynamics with Cruise Control and Lateral Control
Pure Pursuit Based Control
Safety Critical Control (Control Barrier Functions and Safety Certificates)
Control Barrier Functions
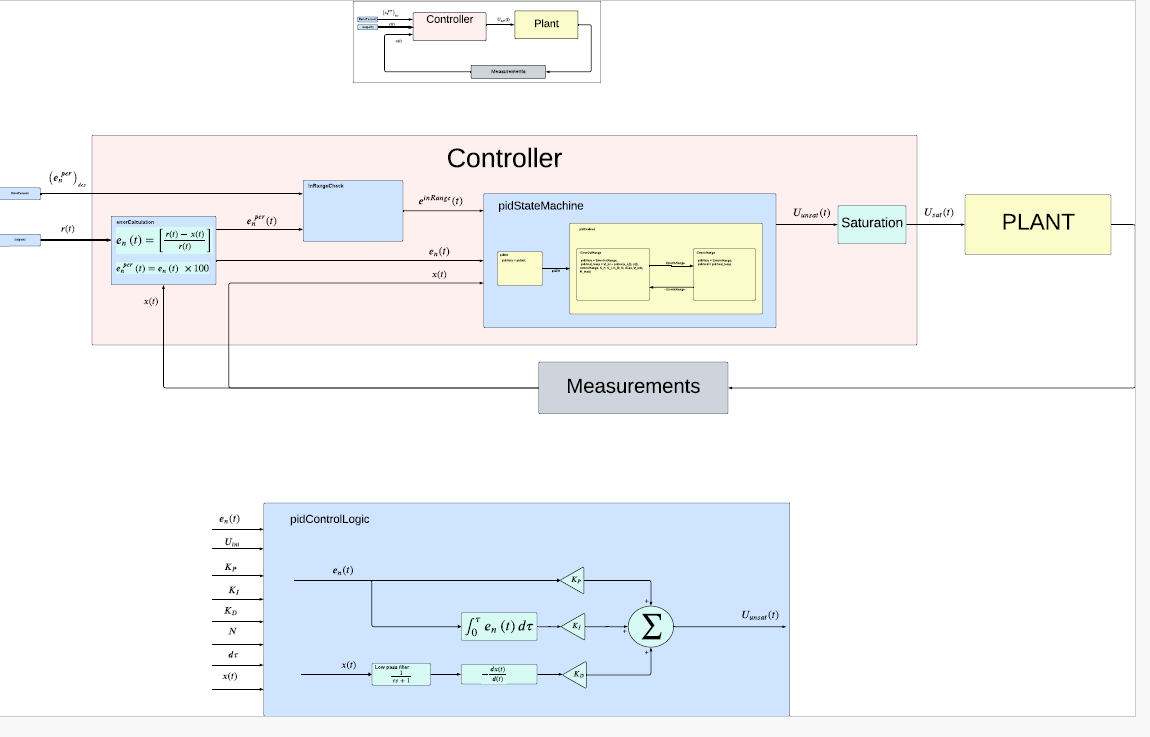
Safety Embedded PID Control for Robotics and Automation. Work in Progress.
Bio / Context
I’m a Controls Engineer for robotics, autonomous vehicles, and UAVs. I love designing safety-critical control and planning algorithms from the ground up using tools from control theory, optimization, vehicle dynamics, robotics, learning, and planning. I’m interested in the intersection of theory and applications. I enjoy developing practical and safe algorithms and applying them to solve real problems in autonomous vehicle controls, flight controls, navigation, decision making, autonomy, and robotics. I have developed, implemented, and published various trajectory tracking control and planning and coordination algorithms for both multi-rotors and mobile robots/vehicles using LQR, PID, MPC, Adaptive, Nonlinear, Path planning based on clothoids, differential flatness, splines, and so on using C++, Python, ROS/Gazebo, MATLAB/Simulink, both in simulation and real-time systems using PX4, dSpace, C++/ROS.
I received my Master’s in Mechanical and Aerospace Engineering at Oklahoma State University, working under Dr. He Bai at the CoRAL Lab from Aug 2016 to Dec 2018. I worked very closely with Dr. Rushikesh Kamalapurkar (currently at UF) and J.Á. Acosta at Universidad de Sevilla (Spain).
During my M.S., I worked on Aerial robotics and Control with a focus on cooperative aerial manipulation and control of multi-agents. We published 3 peer-reviewed conference papers and 2 journals
Current Research Interest
My interest lies in the intersection of control, planning, and learning for autonomous systems. I’m interested in the balance between theoretical analysis and practical implementation on hardware systems in a multi-disciplinary environment. My overall goal is to be a full-stack controls and robotics researcher using tools ranging from control design, autonomous planning, decision making, and implementation on real-time hardware systems.
In general, I’m interested in both deep theoretical foundations and practical applications.
Control and planning of autonomous systems, nonlinear, adaptive, and optimal control
Distributed Controls and Estimation
Multi-vehicle coordination and control
Trajectory optimization and motion planning
Aerial Robotics and Robot Autonomy
Planning/Decision making under uncertainty
Education
M.S. in Mechanical & Aerospace Engineering, Oklahoma State University, 2018
- Robotics & Controls
B.S. in Mechanical Engineering, McNeese State University, 2015
- Mechanical Engineering
Work Experience
Technical Lead, Controls Software
Amogy INC, Brooklyn, NY | Aug 2022 – Present
- Control Algorithms development, testing, and validation of the fully autonomous Amogy System.
- Developed novel PID Control Algorithms for trajectory tracking that reduce actuator chattering and account for sensor error accuracy.
- Lead Controls Engineering, including Hardware & Software Development, Controls Algorithms, State Machine Development, and Network Architecture.
- Developed advanced control algorithms: Nonlinear control, Hybrid controls, Filter design, and Model Predictive Control (MPC).
- Designed advanced networking for redundancy, communications, and data processing.
- Designed HMI systems and implemented noise reduction, filtering, and fault management.
- Developed data structures to integrate different devices for advanced communication, control, and HMI.
- Configured and integrated communication protocols (CAN, Ethernet TCP, Modbus TCP).
- Spearheaded hardware design, including VCU, Raspberry Pi, and dSPACE systems.
- Guided a multidisciplinary team, ensuring compliance with functional safety standards.
- Advise and mentor junior controls, HIL, embedded, and electrical engineers.
- Tools: C/C++, Python, MATLAB, CAN, CANape, CANalyzer, dSPACE, Code Generation, TCP/IP Networking.
Research Engineer (Autonomous Driving - Planning and Controls)
Ford Motor Company, Dearborn, MI | Jan 2021 – Jun 2022
- Research in advanced controls and planning; designed low-speed path planning and control algorithms for autonomous parallel parking, auto-hitch, nudge maneuvers, state machines, and V2V localization/collision-avoidance.
- Designed and implemented a continuous curvature-based path planner and nonlinear rear-wheel feedback lateral controller for auto-hitch and parallel parking (L2 autonomy).
- Created state machines for complex state transitions and management during parking and auto-hitch maneuvers.
- Created Vehicle-to-Vehicle (V2V) networking and TCP/IP UDP data interfaces for real-time data streaming between multiple Ford vehicles for localization and collision avoidance.
- Conducted testing, validation, and refinement of autonomous driving features.
- Tools: Simulink, Stateflow, ROS, C/C++, TCP/IP, dSPACE, CANape, CANalyzer.
Senior Controls Engineer, Autonomy
The Drone Racing League, New York, NY | Jul 2019 – Jan 2021
- Led research, development, and implementation of control algorithms for autonomous drones, focusing on position and attitude control for trajectory tracking.
- Designed and implemented advanced control strategies, including State-Dependent LQR, LQR/LQG, Nonlinear PID, Adaptive Control (MRAC), Geometric Control, and MPC, ensuring robust trajectory tracking and attitude stabilization.
- Developed and analyzed trajectory tracking performance using ROS/Gazebo and PX4 SITL simulations with PID and LQR controllers.
- Implemented solvers for Algebraic Riccati Equations in C++ to support control algorithm development.
- Conducted real-time flight testing, algorithm testing, and debugging for autonomous flight.
- Tools: C/C++, ROS, PX4, Gazebo, Eigen, CMake, Python, MATLAB/Simulink.
Robotics Controls Engineer - March 2019- July 2019
- Deka Research and Development, Manchester, NH
- Autonomous robots, offline path planning, and controls
Updates
Other Interests

