Research
Table of Contents
- Cooperative Control and Manipulation
- Learning Based Control and Estimation
- Autonomous Vehicle Planning and Control
- Autonomous Control of UAV
- Safety Embedded Control
Cooperative Control and Manipulation
Part of M.S Research Work at Oklahoma State with Dr. He Bai at OSU.
Cooperative Control of Unknown Payload, Adaptive Control and Consensus Control.
Aerial Manipulator Design
Aerial Manipulator Flight Test
Learning Based Control and Estimation
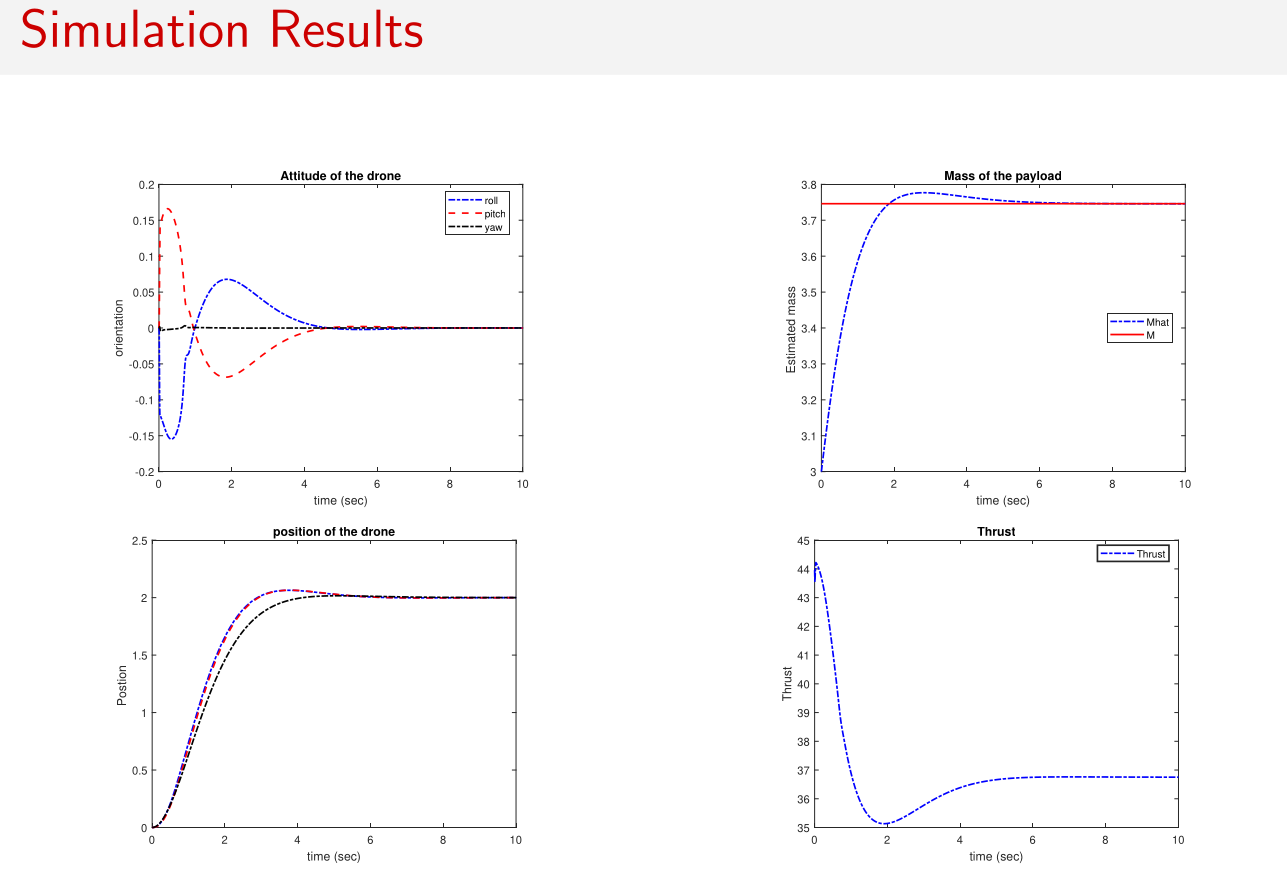
Cooperative Manipulation of an Unknown Payload with Concurrent Mass and Drag Force Estimation. Published in IEEE Control System Letters , 2019. Joint with Dr. Kamalapurkar at OSU, currently at UF.
Drag Force Estimation
Contact Force Acting on the Payload
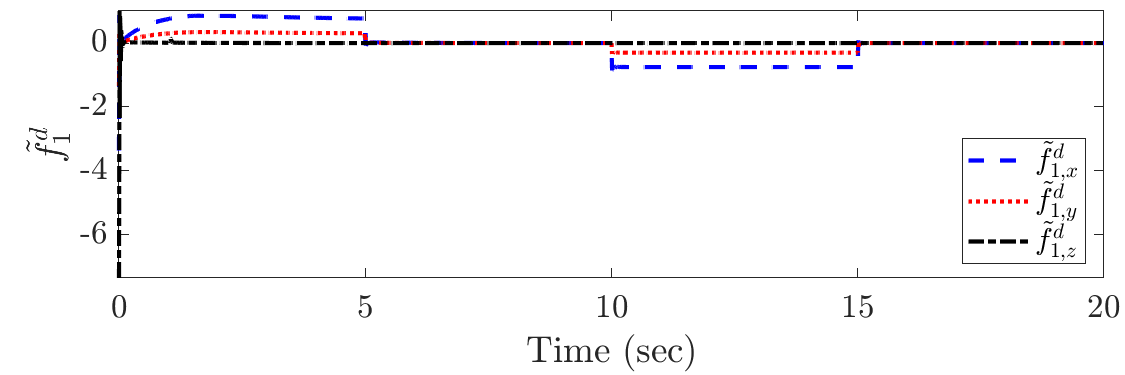
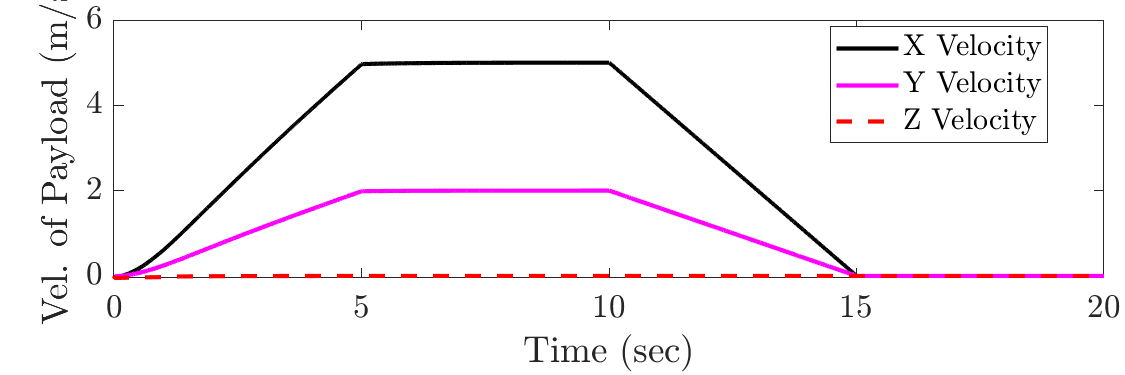
Simulation with Time-Varying Velocity
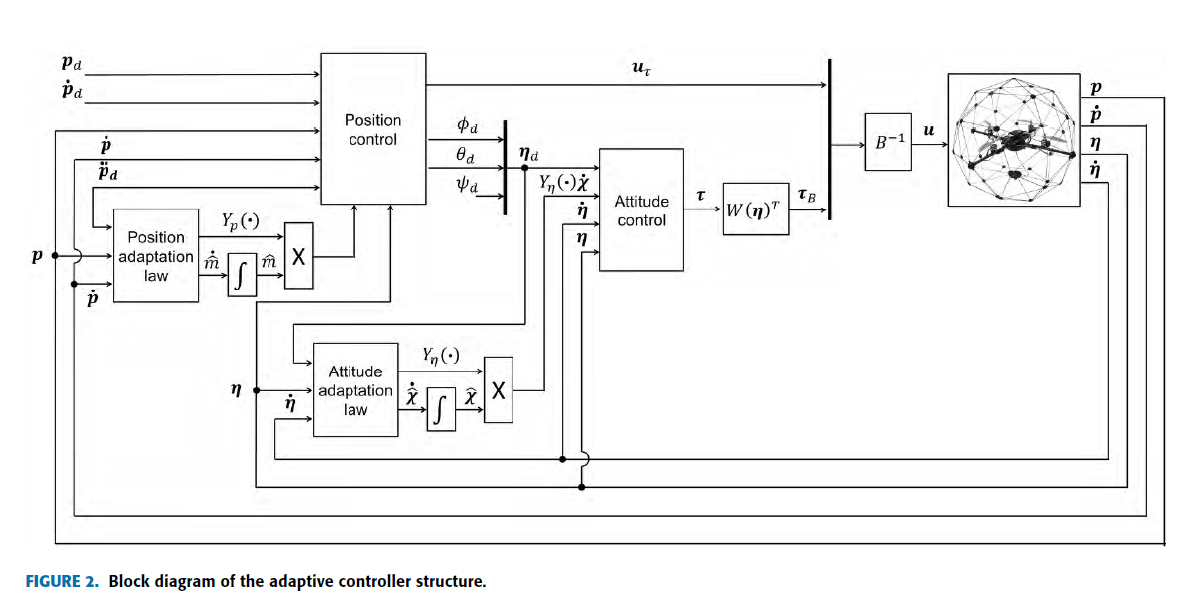
Non-linear Adaptive Geometric Control
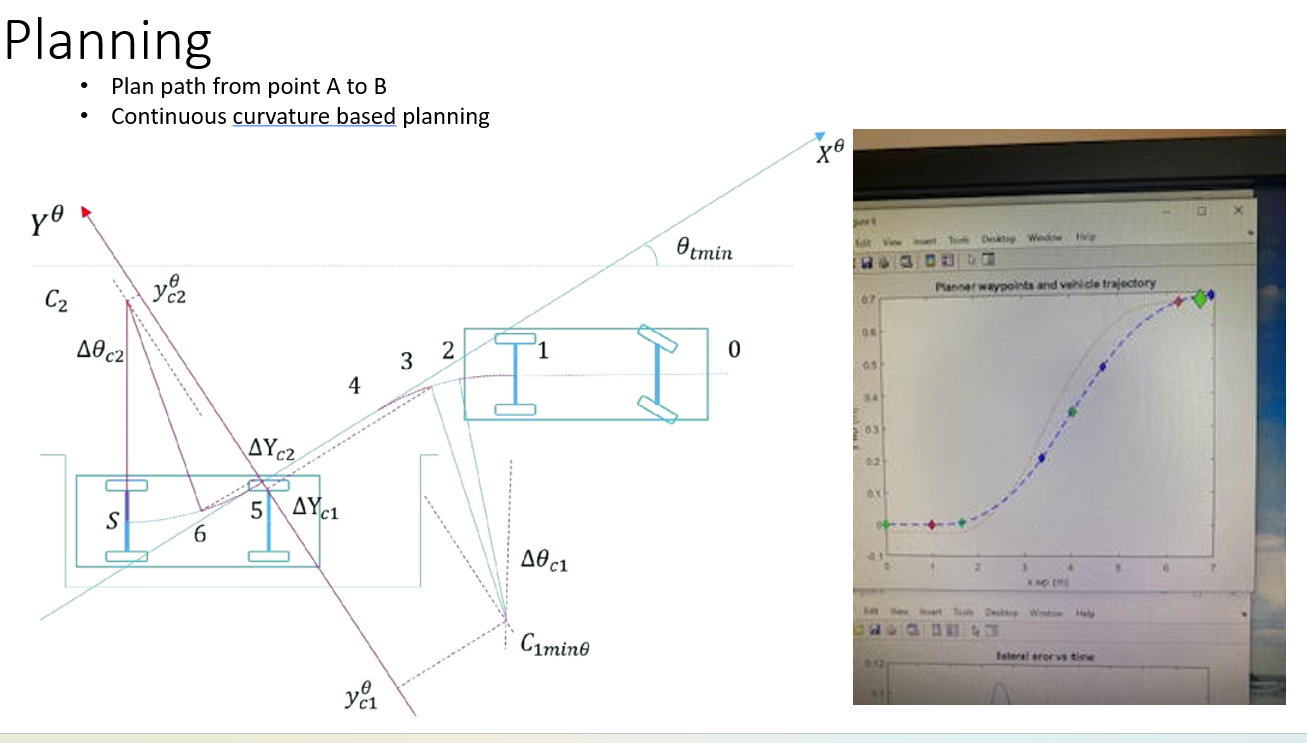
Autonomous Vehicle Planning and Control
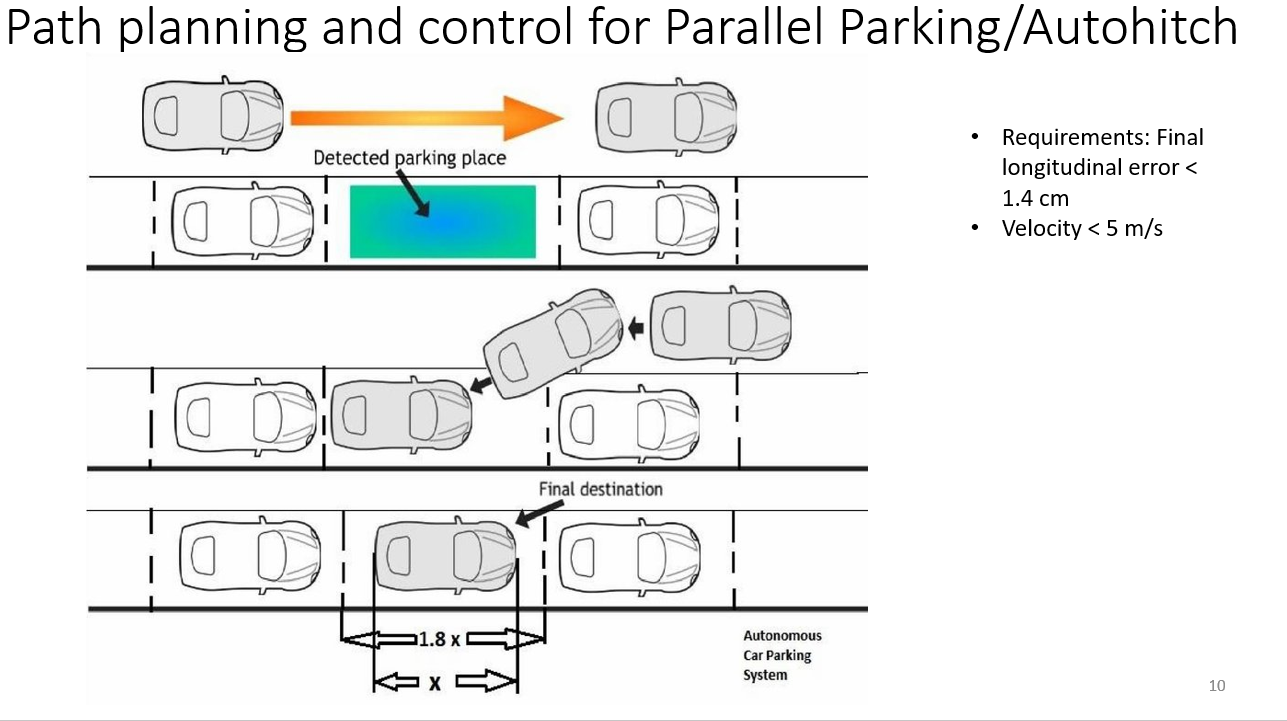
Path Planning Based on Clothoid
Non-linear Rear Wheel Feedback Based Control
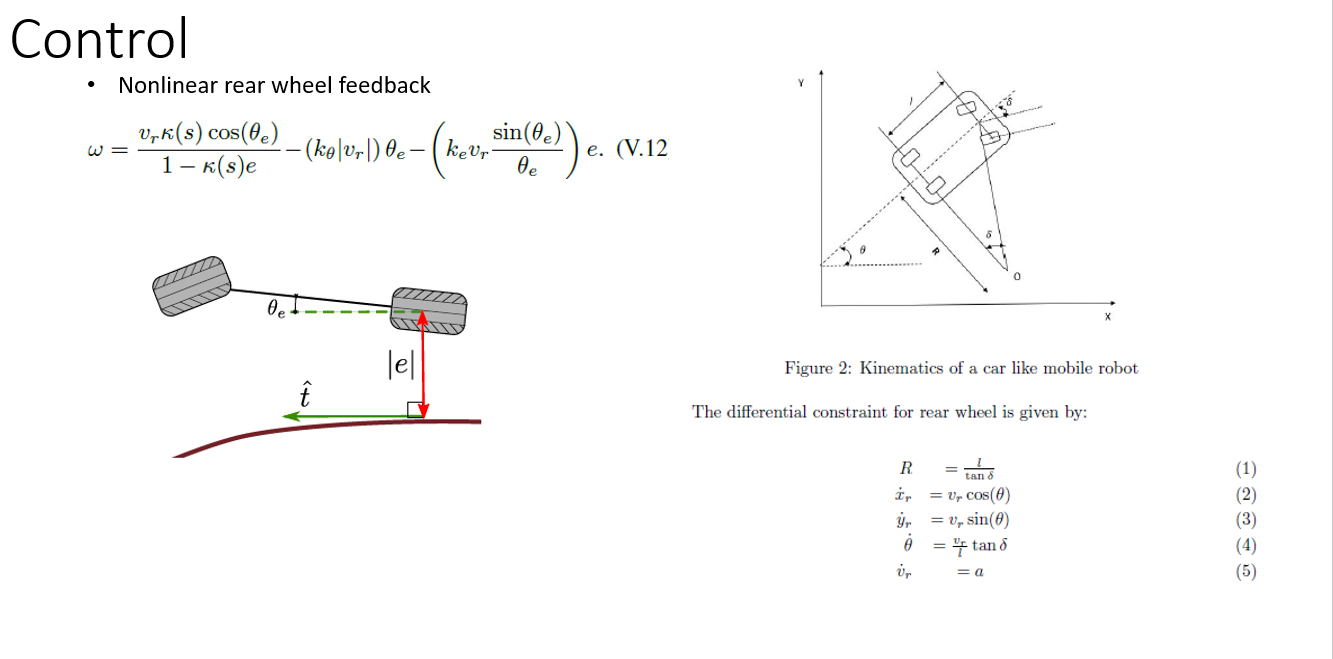
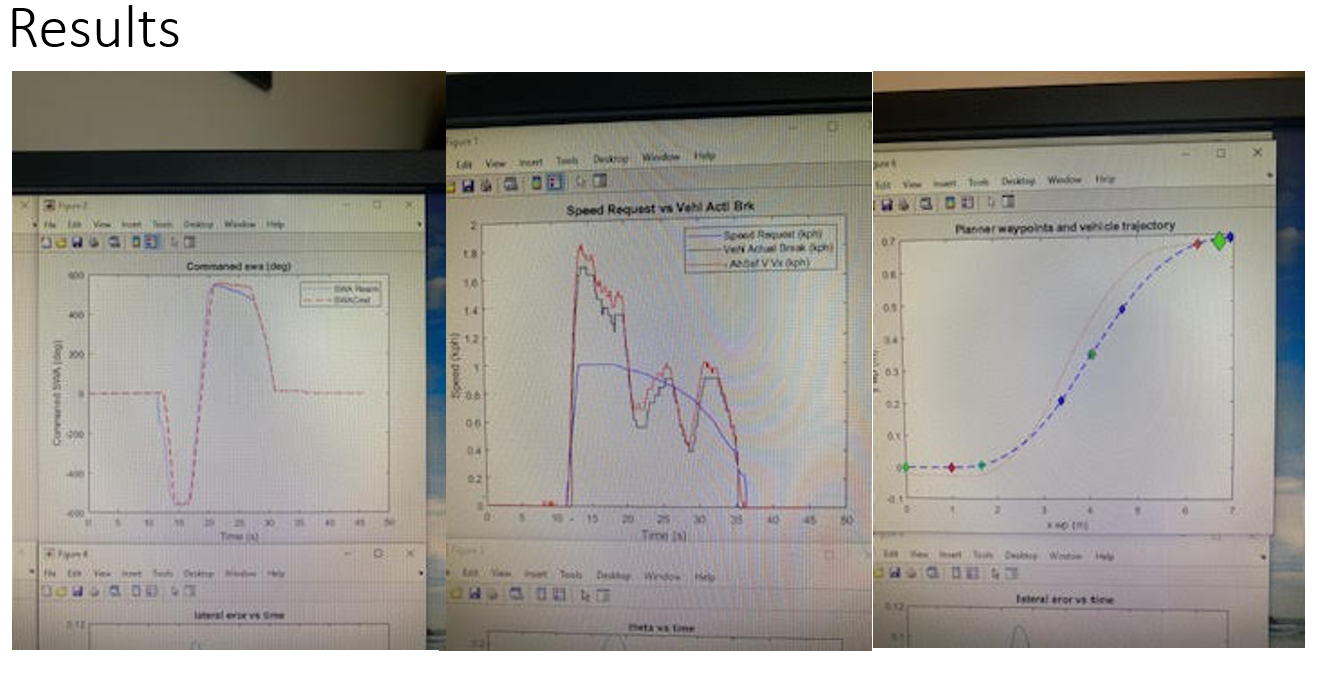
Vehicle Dynamics with Cruise Control and Lateral Control
Pure Pursuit Based Control
Autonomous Control of UAV
State Dependent LQR for Autonomous Trajectory Tracking of Quadrotor UAV
Designed and implemented full state time varying LQR and implemented in real-time Gazebo and PX4 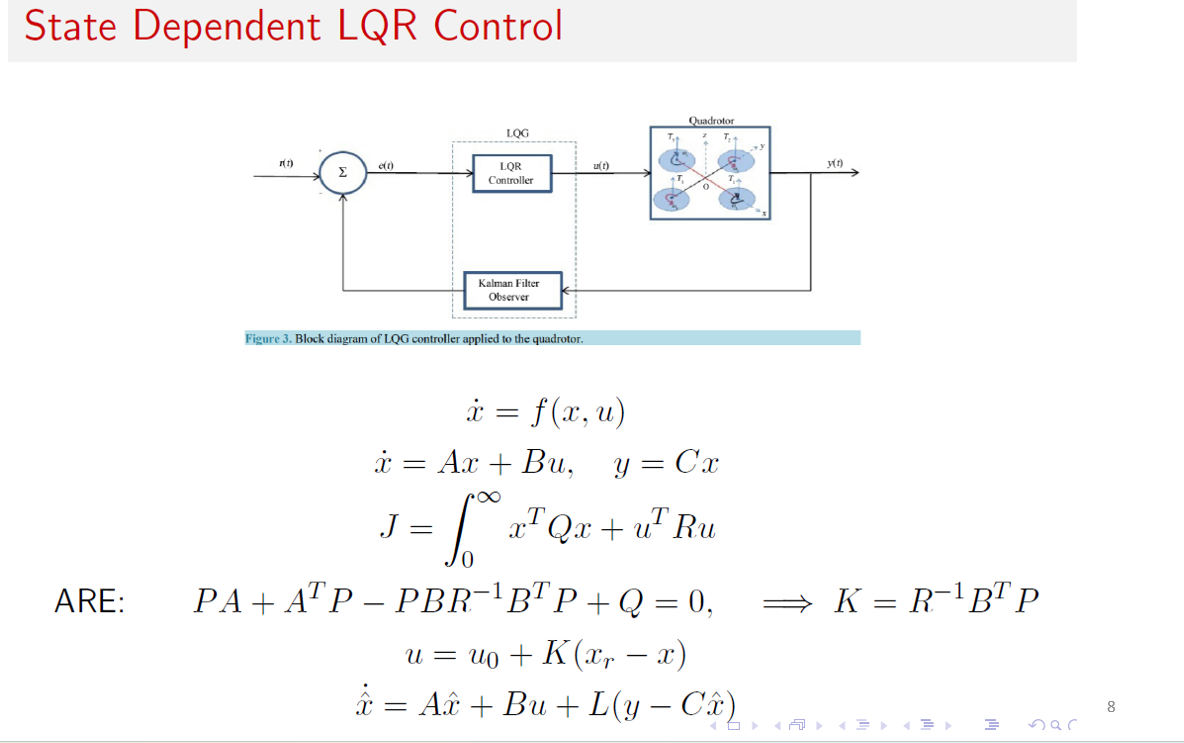
Quadrotor UAV Cascaded PID Control in PX4
Offboard Velocity Control
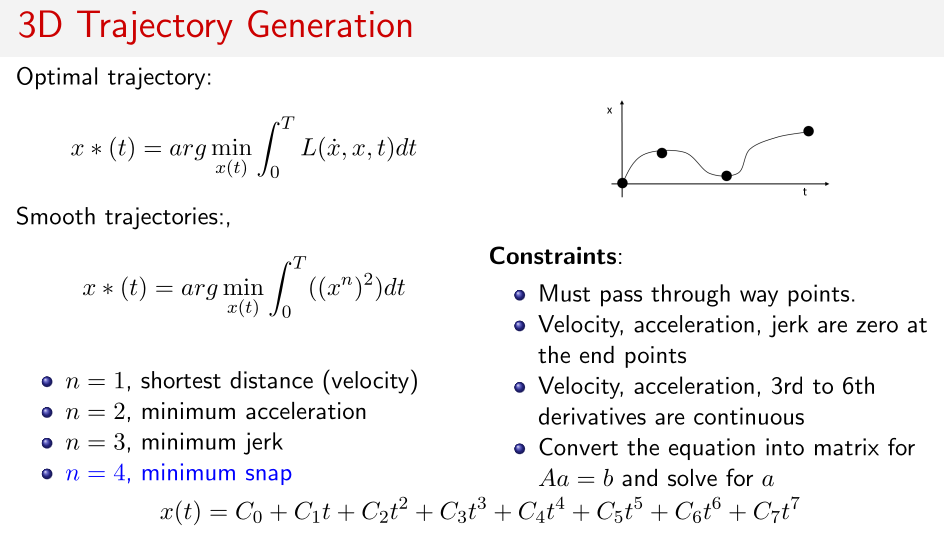
3D Trajectory Generation of UAV
Safety Embedded Control
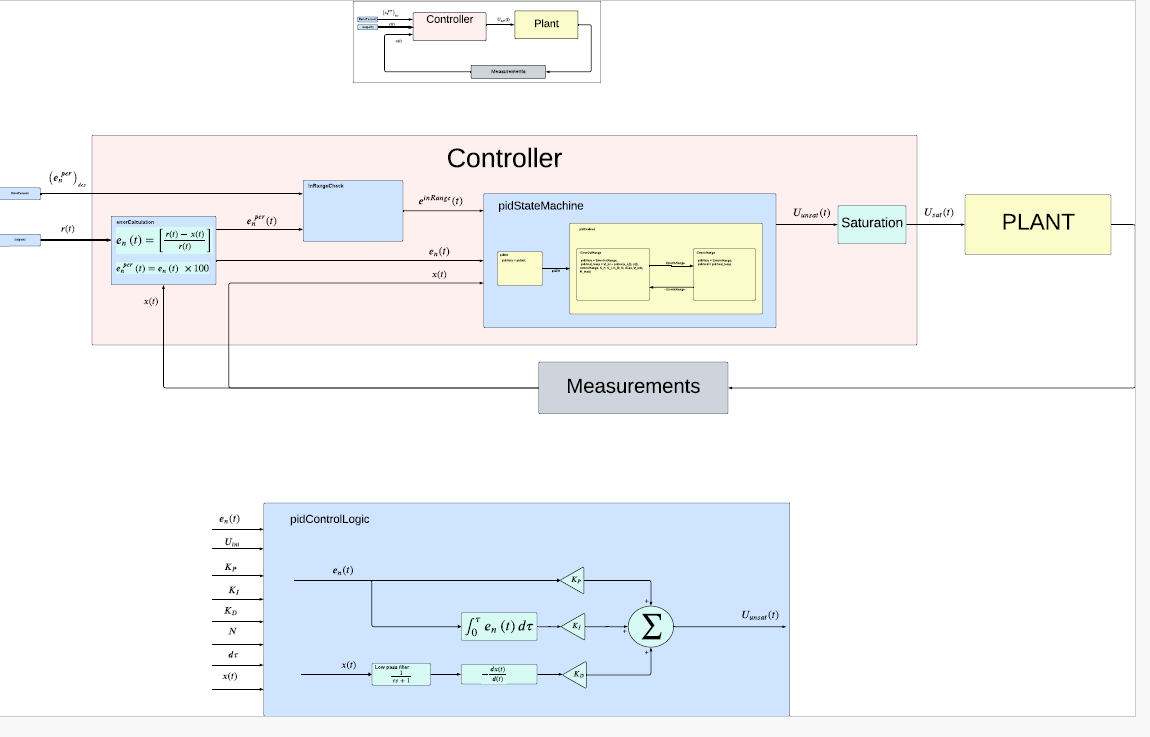
Safety Embedded PID Control for Robotics and Automation. Work in Progress.